
 PIDLQRH控制器实例已修正错误.doc
PIDLQRH控制器实例已修正错误.doc
《PIDLQRH控制器实例已修正错误.doc》由会员分享,可在线阅读,更多相关《PIDLQRH控制器实例已修正错误.doc(17页珍藏版)》请在课桌文档上搜索。
1、-目录0 引言11 原系统的特性11.1 参考论文系统构造图分析11.2 控制对象的传递函数12 PID控制器设计32.1 PID控制器原理322 PID控制器设计42.3 控制器性能分析52.4 Simulink仿真link仿真63 极点配置控制器的设计73.1 极点配置设计73.2 极点配置控制器分析93.3 Simulink仿真94 LQR控制器的设计104.1 LQR控制器原理104.2 LQR控制器设计114.4 Simulink下仿真135 H控制器的设计155.1 H控制器原理155.2 H控制器设计175.3 H控制器分析215.4 Simulink下仿真226 综合比拟23参
2、考文献240 引言随着磁盘驱动器轨道密度的不断增长,越来越多的算法被引入到磁盘驱动器的磁头定位上;由于H控制能详细的指定闭环系统的构造,利用H控制来增强HDD伺服系统的性能和鲁棒性成为一种可行的方法;本文将对几种常见的控制器:PID,极点配置,LQR和H控制器进展研究,并比拟各种控制的优缺点。本文则分别介绍了4种不同的控制控制器来改善系统的动态性能、稳态性能、跟踪性能和抗干扰性能。1 原系统的特性1.1 参考论文系统构造图分析本文通过阅读A parative Study of the Use of the Generalized Hold Function for HDDs一文,对硬盘伺服系统
3、的模型进展分析,如图1-1所示是参考论文系统构造图。图1-1参考论文系统构造图其中P为控制对象、K为控制器、S为采样器、y采样器测量值、v为采样测量噪声、为外部干扰、W为低通滤波器、U为控制器输出、和比例因子。参考论文采用的是H控制器来改善一个离散系统性能,本文在没有考虑采样器情况下,针对控制对象P来设计几种控制器来改善一个连续系统性能,并做了一个横向比拟。1.2 控制对象的传递函数式1为控制对象传递函数,下文中针对控制对象P设计控制器,首先,经过对被控对象分析,参加一个比例因子就可以到达一个根本的控制效果。MATLAB程序仿真如下:num=conv(-3*107,1 -2.4*105 1.9
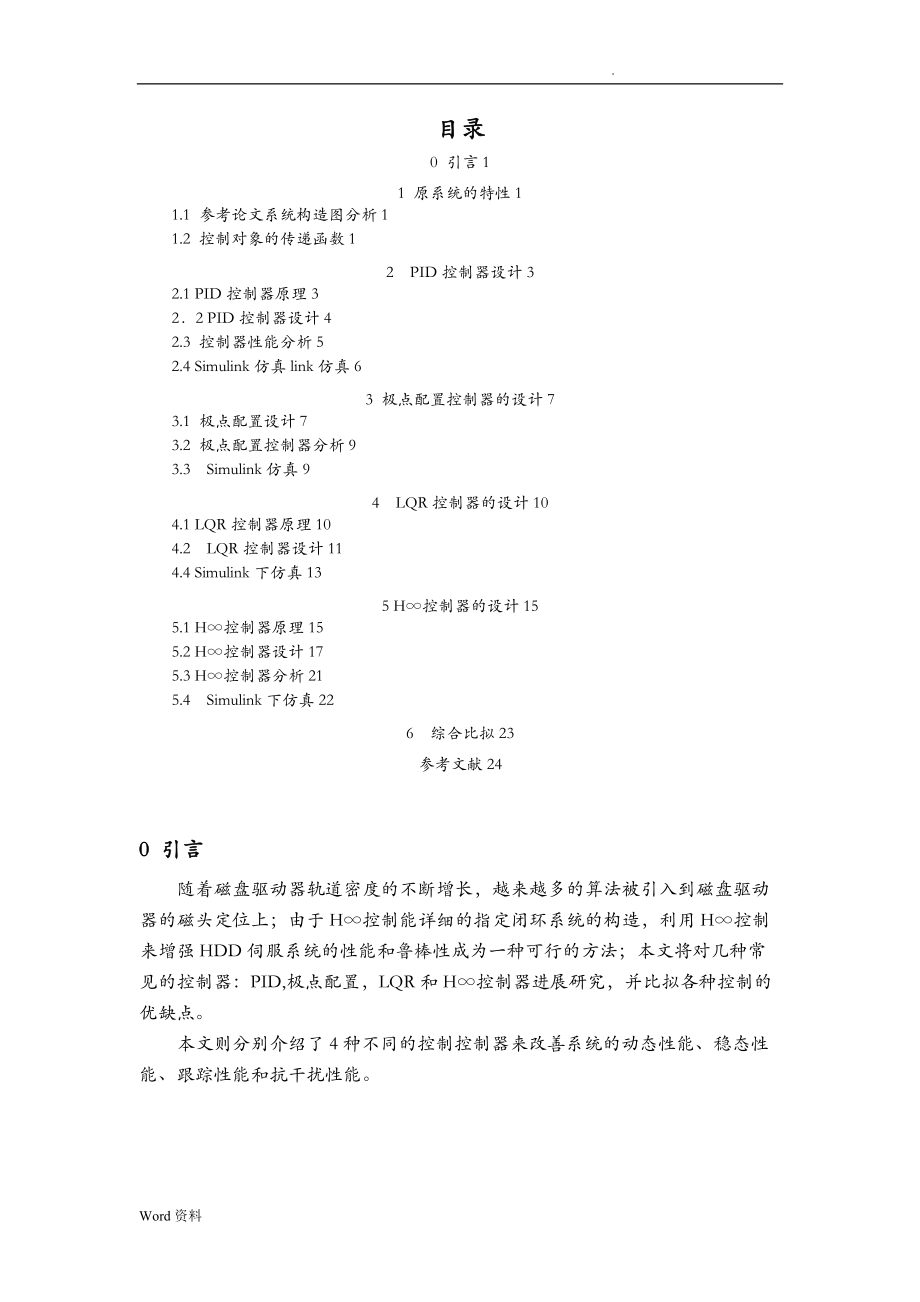
4、2*1010);%多项式乘法den=conv(1 251.3 3.948*105,1 2.4*105 1.92*1010);g1=tf(num,den)g=g1/(-76);%参加比例因子G=minreal(g)figure(1);step(G);Transfer function: 394800 s2 - 9.475e010 s + 7.58e015s4 + 2.403e005 s3 + 1.926e010 s2 + 4.92e012 s + 7.58e015图1-2 原系统阶跃响应曲线由仿真结果知,系统传递函数互质,状态空间最小实现为4阶。如图1-2所示系统阶跃响应曲线可知系统稳定,超调量
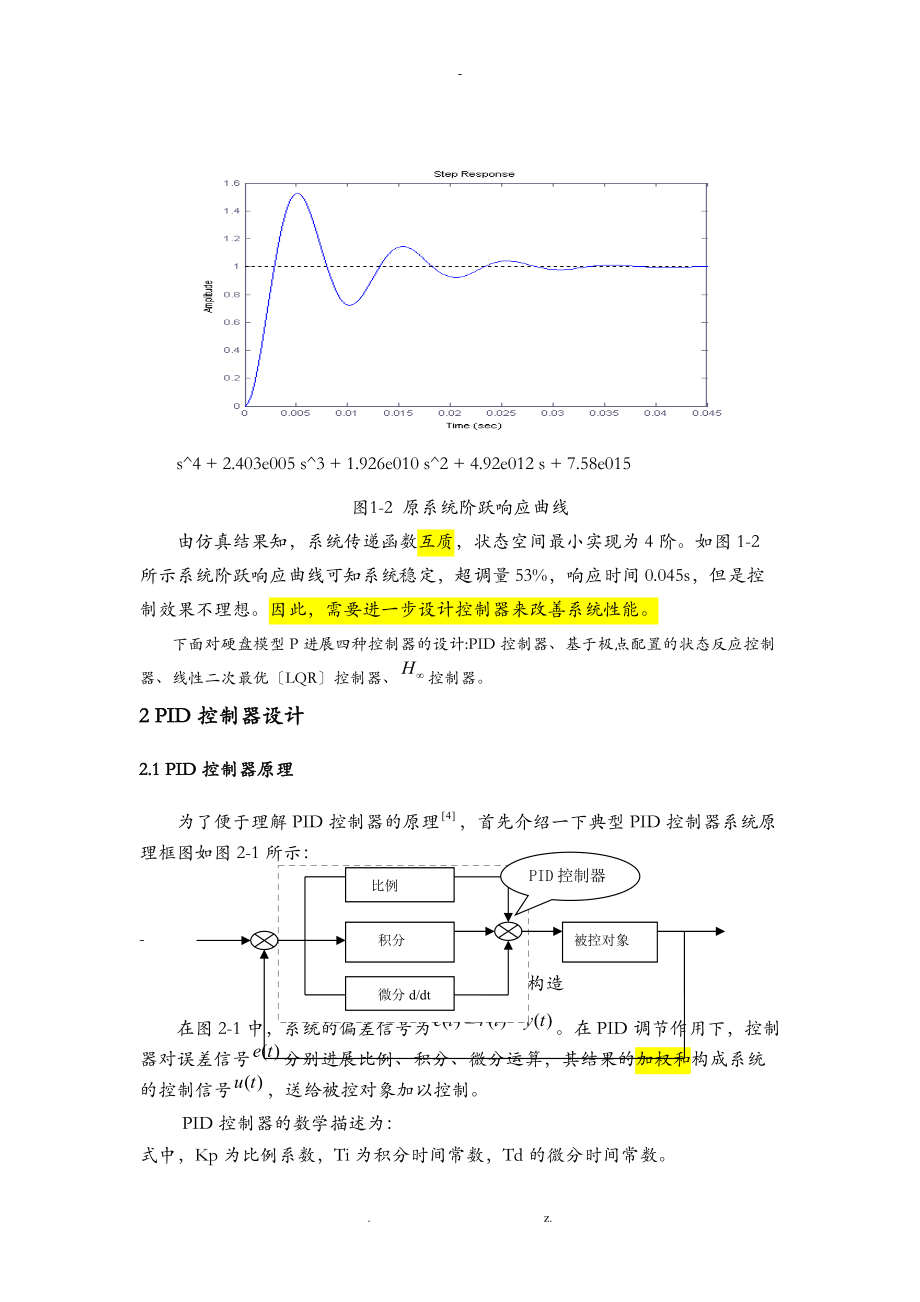
5、53%,响应时间0.045s,但是控制效果不理想。因此,需要进一步设计控制器来改善系统性能。下面对硬盘模型P进展四种控制器的设计:PID控制器、基于极点配置的状态反应控制器、线性二次最优LQR控制器、控制器。2 PID控制器设计2.1 PID控制器原理为了便于理解PID控制器的原理,首先介绍一下典型PID控制器系统原理框图如图2-1所示:-积分比例微分d/dt-被控对象PID控制器-图2-1 典型PID控制构造在图2-1中,系统的偏差信号为。在PID调节作用下,控制器对误差信号分别进展比例、积分、微分运算,其结果的加权和构成系统的控制信号,送给被控对象加以控制。PID控制器的数学描述为:式中,
6、Kp为比例系数,Ti为积分时间常数,Td的微分时间常数。 连续PID控制器的Laplace变换式可以写成:但为了防止纯微分运算,经常用一阶滞后环节来近似纯微分环节,即将PID控制器写成如下形式:本文采用Ziegler-Nichols公式得出PID函数来进展PID控制器的设计,从系统的稳定性、响应速度、超调量和稳态精度等各方面来考虑, kp , ki , kd 的作用如下:(1) 比例系数kp 的作用是加快系统的响应速度,提高系统的调节精度。kp 越大,系统的响应速度越快,系统的调节精度越高,但易产生超调,甚至会导致系统不稳定。kp 取值过小,则会降低调节精度,使响应速度缓慢,从而延长调节时间,
7、使系统静态、动态特性变坏。(2) 积分作用系数ki 的作用是消除系统的稳态误差。ki 越大,系统静态误差消除越快,但ki 过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调。假设ki 过小,将使系统静态误差难以消除,影响系统的调节精度。(3) 微分作用系数kd 的作用是改善系统的动态特性,其作用主要是在响应过程中抑制偏差向任何方向的变化,对偏差变化进展提前预报。但kd 过大,会使响应过程提前制动,从而延长调节时间,而且会降低系统的抗干扰性能。22 PID控制器设计参加PID控制器之后,通过如上所述kp、ki、kd 的作用调节Kp、Ti、Td参数使得闭环传递函数阶跃响应到达理想
8、效果,MATLAB程序仿真如下:num=conv(-3*107,1 -2.4*105 1.92*1010);den=conv(1 251.3 3.948*105,1 2.4*105 1.92*1010);G1=tf(num,den);G=G1/(-76);%这一项有问题G1=-G1;Kc,b,Wc,d=margin(G1);%取得控制对象幅值裕度Kc、相位裕度d、和穿插频率Wc、dTc=2*pi/Wc; %求取参数Kp=0.45*Kc;Ti=0.5*Tc;Td=0.5*Tc;GPID=Kp*(1+tf(1,Ti 0)+tf(Td 0,Td/20 1); figure(2);step(feedb
9、ack(G1*GPID,1),-,G,-);figure(3);bode(feedback(G1*GPID,1),-,feedback(G,1),-);a*is(0 0.01 0 1.6) %有问题,这里%各参数取值为:Kp = 0.068Ti = 9.5869e-004Td =9.5869e-004N=20设计控制器为:系统阶跃响应曲线如图2-2所示:图2-2 PID控制前后的阶跃响应曲线图2-3 PID控制后系统的伯德图2.3 控制器性能分析如图2-2、图2-3所示分析了PID控制前后系统动态性能和稳态性能,系统的超调量由53%降为14.2%,调节时间由0.045s降到0.00452s,动
10、态性能明显提高。从闭环系统伯德图可以看出,系统零频幅振比M(0)=0db,所以阶跃响应输入时,其稳态误差为0,另外,校正后系统的谐振峰值远小于原系统,所有超调量比拟小,而频带宽度比原系统宽,所以调节时间比拟短,快速性比拟好,但抗干扰性能比拟差。再看PID控制的扰动输入时情况。在原系统模型中:1、令,则可得到由输入到输出的传递函数为: 62、令,则可得到由干扰到输出的传递函数为: 7由以上分析可知,。MATLAB程序仿真如下:figure(3);step(1/(1+GPID*G1); %干扰信号的阶跃响应a*is(0 0.007 -0.3 1.2);图2-4 PID控制系统抗干扰性能曲线图2-4
11、所示,PID控制器作用下系统对阶跃干扰信号几乎可以完全抑制,系统抗干扰性能非常好。因此,该控制器方案到达预期效果。2.4 Simulink仿真link仿真利用Simulink仿真PID控制,仿真图如下列图2-5图2-5 Simulink仿真图仿真结果如下:图2-6 阶跃响应曲线图2-7 控制信号输入从图2-6,图2-7仿真结果可以知道,系统可以较快跟踪阶跃信号,而且控制对象的控制信号输入也在合理围以。3 极点配置控制器的设计3.1 极点配置设计本文中原系统传递函数是4阶SISO系统,且系统传递函数互质,因此首先把系统化为能控标准型,然后可直接进展基于状态反应的极点配置。由对控制对象分析知道,系
12、统的平衡实现中:g= 可以看出系统有两个极点的权重非常小,可以忽略它的影响,对系统分析时,系统的主要性能由主导极点决定。对系统进展降阶,可以得到系统降阶后传递函数为:系统降阶后模型为一个二阶系统。对于二阶系统,其特征多项式为,对应特征根为,对于二节系统动态特性来说,当=0.707是为比拟理想,这时。基于以上分析选择两个主导极点和两个远极点,得到MATLAB程序仿真如下:num=conv(-3*107,1 -2.4*105 1.92*1010);den=conv(1 251.3 3.948*105,1 2.4*105 1.92*1010);G1=tf(num,den);G=G1/(-76);Gs
13、=sscanform(G,ctrl) %把原系统化为能控标准型A B C D=ssdata(Gs);P=-3000-3000i,-3000+3000i,-20000,-21000; %期望极点K=acker(A,B,P);Ac=A-B*K;num,den=ss2tf(Ac,B,C,D);G1=tf(num,den);Gs1=sscanform(G1,ctrl);figure(2);step(G,-,G1,-); %控制前后的阶跃响应figure(3);subplot(1,2,1)margin(G); %原系统伯德图subplot(1,2,2)margin(G1); %PID控制系统伯德图图3-
14、1 极点配置控制前后系统阶跃响应曲线图3-2 极点配置控制前后系统的伯德图3.2 极点配置控制器分析如图3-1、图3-2所示基于极点配置状态反应控制前后系统动态性能和稳态性能,系统超调量由53%降为4%,调节时间由0.045s降到0.002s,动态性能大幅提高。从系统伯德图可以看出,系统零频幅振比M(0)=0db,所以阶跃响应输入时,其稳态误差为0,另外,校正后系统的谐振峰值为0,所以没有振荡,且超调量比拟小,而频带宽度比原系统宽,所以调节时间比拟短,快速性比拟好,但抗干扰性能比拟差。3.3 Simulink仿真用simulink仿真如下:图3-3 极点配置系统构造图3-4 极点配置系统阶跃响
15、应曲线如图3-3、3-4所示simulink仿真与程序仿真效果一样。因此,该控制器方案比拟理想。4 LQR控制器的设计4.1 LQR控制器原理线性二次型调节器问题简称LQR (Linear Quadratic Regulator)问题在现代控制理论中占有非常重要的位置, 受到控制界的普遍重视。LQR 方法具有设计规、易于工程实现以及能够获得线性反应构造等优点。但在使用该方法时, 最优控制效果取决于加权阵Q 和R 的选取, 如果Q 和R 选取不当, 则可能使求得的解不能满足实际系统的性能要求, 就更谈不上“最优了,有时还能得出误导性的结论。设给定线性定常系统的状态方程: (1)二次性能指标函数定
16、义为: 满足二次型目标函数J为最小(8)其中:*为n 维状态向量, U为r维输入向量, A,B分别是nn, nr 维常数矩阵, Q为正定(或半正定)实对称矩阵, R为正定厄米特或实对称矩阵。LQR(Linear Quadratic Regulator)问题表示这样一种物理概念:假设系统受到外界扰动, 偏离零状态后(即到达*一初态*0), 应施加怎样的控制使系统回到零状态附近, 并满足二次型目标函数J 为最小。此时的称为最优控制,使式(8)取得最小值的最优控制律为: 9式中P就是Riccati方程的解, K是反应增益矩阵。目前确定加权矩阵Q 和R 的普遍方法是仿真试凑法, 该方法的根本原理是:首
17、先进展分析初步选取Q 和R, 通过计算机仿真判断其是否符合设计要求, 如果符合要求则停顿仿真。然后用MATLAB 函数库可以直接求得反应增益矩阵K,P=LQR(A B Q R) ,其中向量K为状态反应向量,P为Riccati代数方程的解,把K代入到实际系统控制器参数中,可以得到状态反应下的闭环系统的状态方程为A-BK,B,C-DK,D。这样就完成了控制器的设计。一般情况下,如果希望输入信号小,则选择较大的R矩阵,这样可以迫使输入信号变小,否则目标函数将增大,不能到达最优的要求。对多输入系统来说,假设希望第i个输入小些,则R的第i列的值应该选得大一些,如果希望第j个状态变量的值小一些,则应该相应
18、地将Q矩阵的第j列元素选择较大的值,这时最优化功能会迫使该变量变小。4.2 LQR控制器设计在硬盘控制器中,经过权衡各方参数后选取Q=1 0 0 0;0 50 0 0;0 0 1 0;0 0 0 5000;R=0.5;编写matalab程序如下:num=conv(-3*107,1 -2.4*105 1.92*1010);den=conv(1 251.3 3.948*105,1 2.4*105 1.92*1010);%原函数模型G1=tf(num,den);%程控传递函数G=G1/(-76);%把原函数变为单位无差G_t=G1/-36;%先选定一个比例因子 A B C D=ssdata(G_t)
19、;%状态空间模型数据的访问Q=1 0 0 0;0 50000 0 0;0 0 1 0;0 0 0 5000;R=0.5;K,S=lqr(A,B,Q,R);Ac=A-B*K;Cc=C-D*K;%计算状态反应后的状态空间方程Gk=ss(Ac,B,Cc,D);Gk1=tf(Gk);figure(2);step(Gk1,-,G,-)%与原系统进展比拟figure(3);bode(Gk,-,G_t,-);gm,pm,wg,wp=margin(Gk);gm1,pm1,wg1,wp1=margin(G_t);figure(4);step(1-Gk1);%扰动输入阶跃响应。结果如下:设计状态反应阵为:K =



- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- PIDLQRH 控制器 实例 修正 错误
 课桌文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
课桌文档所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 家用和商用燃气衣物烘干机电气安全、电子控制系统的控制及电磁兼容安全.docx家用和商用燃气衣物烘干机电气安全、电子控制系统的控制及电磁兼容安全.docx
PLC的自动扶梯多功能变频节能控制系统设计.docPLC的自动扶梯多功能变频节能控制系统设计.doc
三层货运电梯的PLC控制系统设计.doc三层货运电梯的PLC控制系统设计.doc
PID调节器和水泵.docPID调节器和水泵.doc
特种设备常发事故及应急措施.docx特种设备常发事故及应急措施.docx
成套集控保护屏柜台技术要求企业标准.doc成套集控保护屏柜台技术要求企业标准.doc
场(厂)内专用机动车辆制造、修理(含修理、改造)单位证后监督抽查项目、内容及记录.docx场(厂)内专用机动车辆制造、修理(含修理、改造)单位证后监督抽查项目、内容及记录.docx
发电厂组织机构和管理模式.docx发电厂组织机构和管理模式.docx
大型游乐设施安装(含修理)单位证后监督抽查项目、内容及记录.docx大型游乐设施安装(含修理)单位证后监督抽查项目、内容及记录.docx
家用和商用燃气衣物烘干机电气安全、电子控制系统的控制及电磁兼容安全.docx家用和商用燃气衣物烘干机电气安全、电子控制系统的控制及电磁兼容安全.docx
PLC的自动扶梯多功能变频节能控制系统设计.docPLC的自动扶梯多功能变频节能控制系统设计.doc
三层货运电梯的PLC控制系统设计.doc三层货运电梯的PLC控制系统设计.doc
PID调节器和水泵.docPID调节器和水泵.doc
特种设备常发事故及应急措施.docx特种设备常发事故及应急措施.docx
成套集控保护屏柜台技术要求企业标准.doc成套集控保护屏柜台技术要求企业标准.doc
场(厂)内专用机动车辆制造、修理(含修理、改造)单位证后监督抽查项目、内容及记录.docx场(厂)内专用机动车辆制造、修理(含修理、改造)单位证后监督抽查项目、内容及记录.docx
发电厂组织机构和管理模式.docx发电厂组织机构和管理模式.docx
大型游乐设施安装(含修理)单位证后监督抽查项目、内容及记录.docx大型游乐设施安装(含修理)单位证后监督抽查项目、内容及记录.docx

链接地址:https://www.desk33.com/p-6417.html